Flying robots are becoming more and more common. Yet, they also come with safety concerns. Quadrocopter drones, the most popular type, have fast-spinning propellers. Their rigid structures and loud noise levels make them unsuitable for close-range human interaction. Yet, can we design flying robots that people can safely touch and interact with?
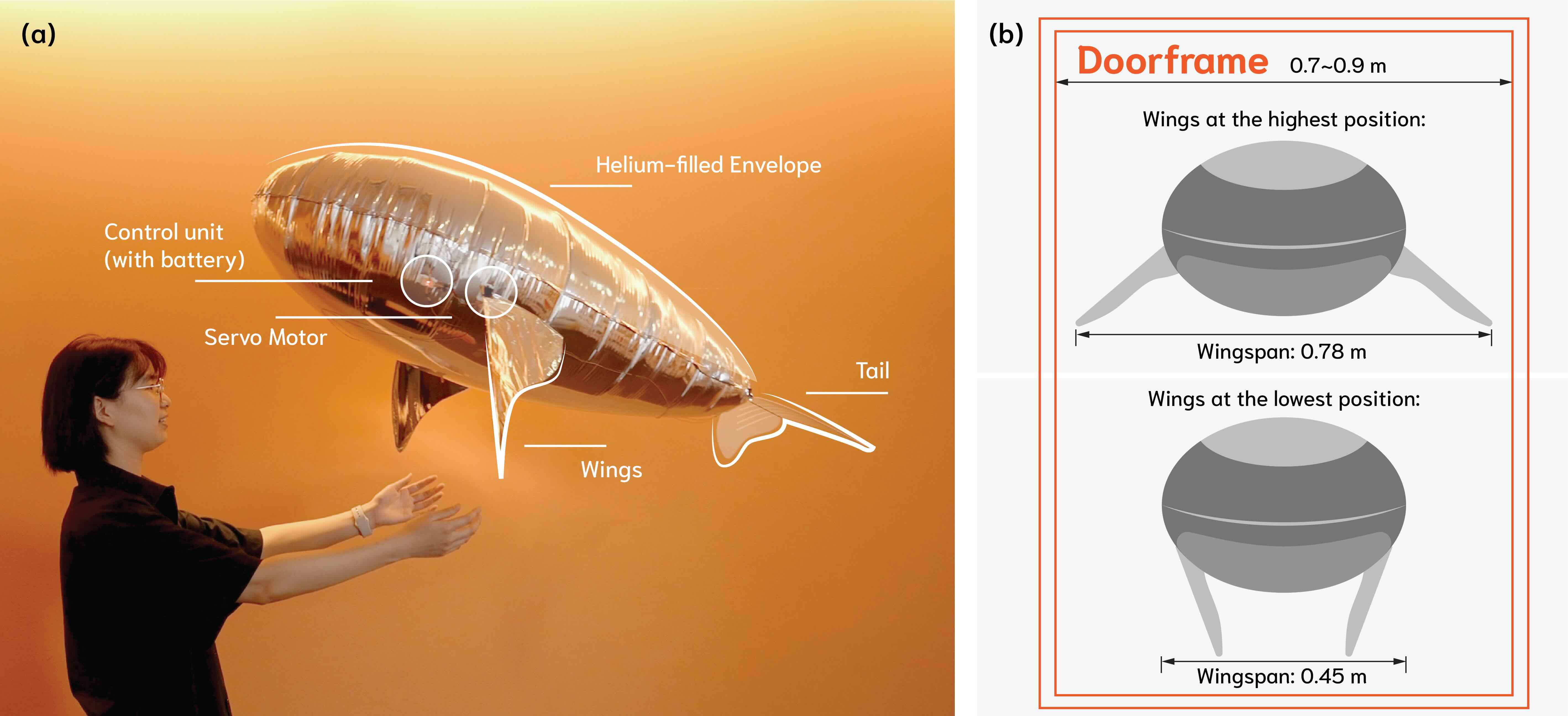
Our recent work, lead by Mingyang Xu, introduces Cuddle-Fish, a soft floating robot that takes a different approach to aerial robotics. Instead of using propellers, the robot combines a helium-filled soft body with low-frequency flapping wings inspired by animal movement. It’s also the first of its kind that fits in normal indoor environments (like appartments and homes). Its design eliminates the danger of spinning blades while maintaining the ability to move through indoor spaces.
The robot’s soft construction allows people to touch it without risk of injury. We tested this with 24 participants who interacted with the robot in a controlled study. What we observed was striking: participants didn’t just tolerate the robot’s presence—they actively engaged with it. Without being prompted, people patted, stroked, and even hugged the robot. Some participants touched it to their cheeks. These spontaneous affective behaviors suggest that the soft, approachable design creates a different kind of relationship between humans and robots.
The flapping-wing mechanism serves two purposes. It provides propulsion for controlled movement, and it creates a visual presence that feels more organic than mechanical. The wings move at a low frequency, which keeps the noise level minimal. The helium provides lift, so the wings don’t need to generate the same amount of force as a heavier-than-air vehicle would require.
Indoor environments present particular challenges for flying robots. Space is limited, and people expect to move freely without worrying about aerial hazards. Cuddle-Fish addresses these concerns through its inherently safe design. If the robot bumps into someone, the soft body and slow-moving wings pose no threat. This opens up possibilities for applications that traditional drones cannot fulfill.
We see potential uses in companionship and affective interaction. The robot’s ability to elicit spontaneous touching and positive emotional responses suggests it could serve in therapeutic settings or as a social presence for people who spend time alone. The quiet operation and gentle movement make it suitable for environments where noise and sudden motions would be disruptive.
This work demonstrates that lighter-than-air flapping-wing robots represent a viable alternative to conventional quadrotors for indoor human-robot interaction. The combination of soft materials, helium lift, and bioinspired propulsion creates a robot that people perceive as safe and approachable. Further development could expand the range of movements and interactions the robot can perform.
The field of social robotics has largely focused on ground-based platforms. Cuddle-Fish shows that aerial robots can also engage in close physical interaction when designed with safety and approachability as primary concerns. The spontaneous affective behaviors we observed suggest that people are ready to accept flying robots into their personal space—as long as those robots are designed to be touched.
Reference
Mingyang Xu, Jiayi Shao, Yulan Ju, Ximing Shen, Qingyuan Gao, Weijen Chen, Qing Zhang, Yun Suen Pai, Giulia Barbareschi, Matthias Hoppe, Kouta Minamizawa, and Kai Kunze. 2025. Cuddle-Fish: Exploring a Soft Floating Robot with Flapping Wings for Physical Interactions. In Augmented Humans International Conference 2025 (AHs ‘25), March 17–19, 2025, Reims, France. ACM, New York, NY, USA, 14 pages. [https://doi.org/10.1145/3745900.3746080] (https://doi.org/10.1145/3745900.3746080)